
Im Rahmen des durch das BMBF geförderten Forschungsprojekts RAPtOr wird gemeinsam mit dem Heinz Maier-Leibnitz Zentrum der TU München sowie mit der TU Claustal der Einsatz aktueller Robotertechnologien für die Probenpositionierung bei der Neutronendiffraktometrie erforscht.
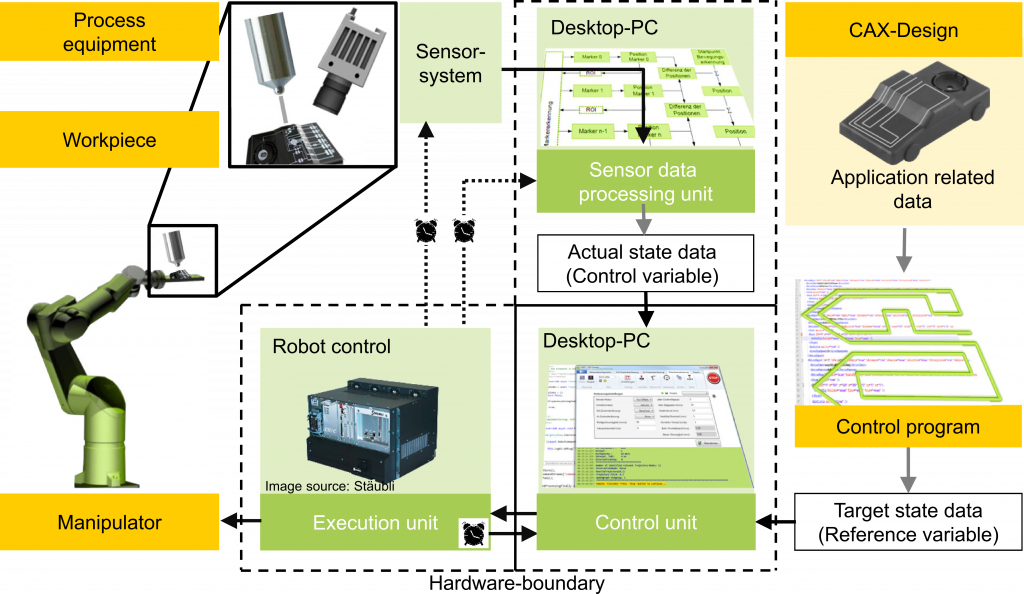
Ziel des Forschungsprojektes ist die Probenpositionierung im Fokuspunkt der Neutronenquelle zukünftig automatisiert über einen klassischen 6-Achs-Industrieroboter zu realisieren. Aufgrund der erforderlichen absoluten Positioniergenauigkeit von 50 µm wird hierfür ein Mess- und Regelungssystem entwickelt und realisiert, das die hochpräzise Positionserfassung des am Roboter angebrachten Messobjekts im gesamten Arbeitsbereich erlaubt und Abweichungen von der vorgegebenen Soll-Position kompensiert. Zusätzlich wird im Rahmen des Projektes eine automatisierte Ableitung von Messprogrammen basierend auf der Bauteilgeometrie erforscht und entwickelt sowie eine Kollisionsvermeidung für den Roboter integriert.
Gegenüber dem Stand der Technik ermöglichen die anvisierten Ergebnisse des Forschungsprojekts eine Substitution der aktuell eingesetzten kostenintensiven Sonderkinematiken, eine erhöhte Anzahl von Freiheitsgraden bei der Probenpositionierung sowie die automatisierte Generierung und Durchführung von Messprogrammen.
Kontakt:
Dr.-Ing. Sebastian Reitelshöfer
Department Maschinenbau (MB)
Lehrstuhl für Fertigungsautomatisierung und Produktionssystematik (FAPS, Prof. Franke)
- Telefon: +491622604719
- E-Mail: sebastian.reitelshoefer@faps.fau.de