Im Rahmen der Forschungsvereinigung IFL (Intralogistik, Fördertechnik und Logistiksysteme e.V.) erforscht der Lehrstuhl FAPS den Einsatz autonomer Flugroboter für den innerbetrieblichen Warentransport, insbesondere im Kontext der vollautonomen Belieferung von Kommissionierplätzen direkt vom Lagerort.
Wie auch bei der Zustellung von Lieferungen in Außenbereichen bieten autonome Flugroboter auf Grund ihrer dreidimensionalen Bewegungsmöglichkeit und den daraus resultierenden, im Vergleich zum flurgebundenen Transport, kurzen Transportstrecken, der erzielbaren Transportgeschwindigkeiten, ihrer flexiblen Einsetzbarkeit und ihrer wartungsarmen und kostengünstigen Bauform weitreichende Einsatzmöglichkeiten. Durch die Erweiterung der Intralogistik um die dritte Dimension kann bislang ungenutzter Raumbereich in den Materialfluss mit einbezogen und somit die am Boden für Logistikprozesse benötigten Fläche reduziert werden.
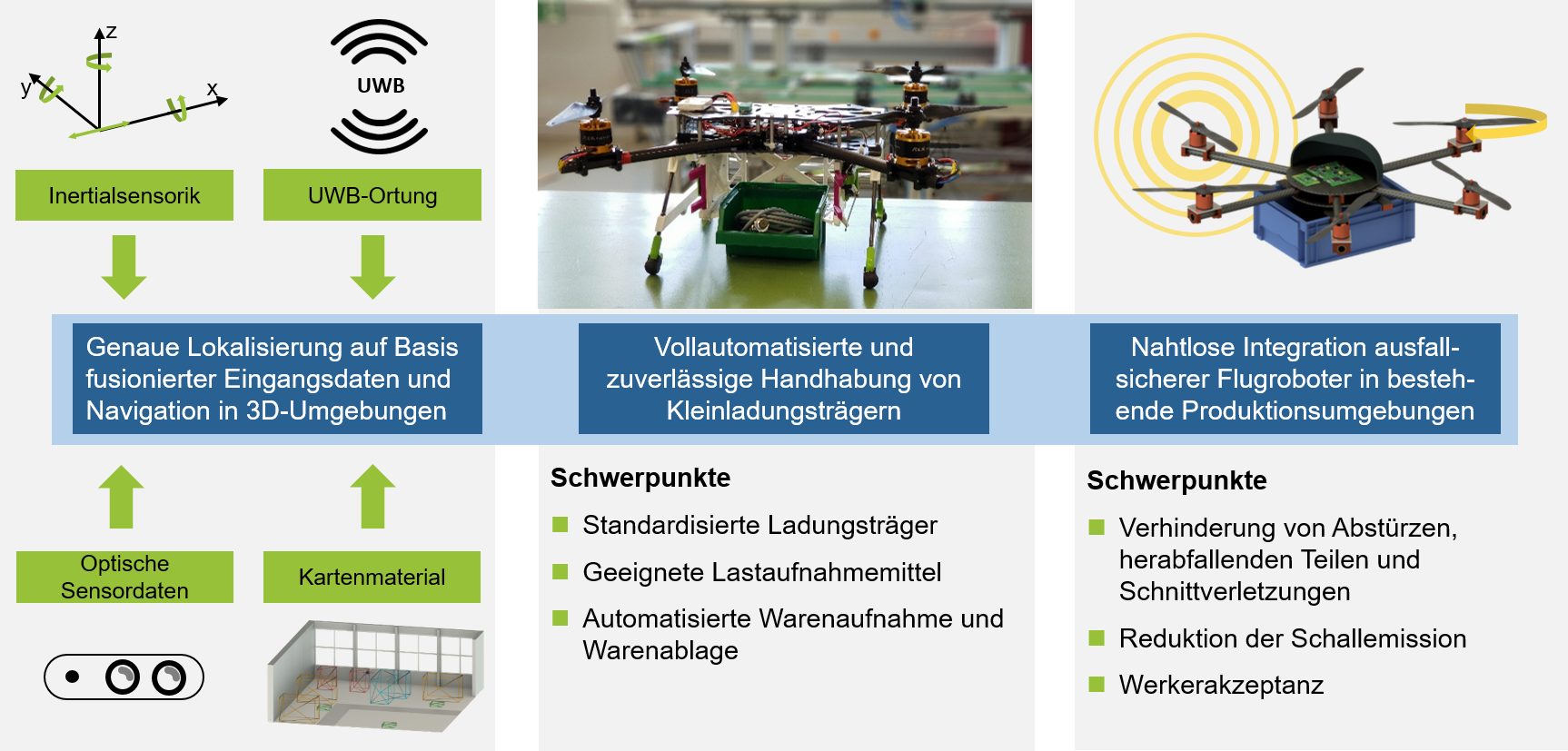
Um die Grundlage für einen universellen intralogistischen Einsatz von Flugrobotern zu schaffen und die hierfür entscheidenden Technologien weiterzuentwickeln, fokussieren sich die Forschungsarbeiten des Projekts AIRKom auf folgende Bereiche:
- Präzise und zuverlässige Indoornavigation mit Flug- und Lokalisierungsgenauigkeiten im Subzentimeterbereich
- Dreidimensionale Pfadplanung und sensorbasierte Kollisionsvermeidung
- Vollautomatisierte Aufnahme und Ablage von standardisierten Ladungsträgern mit Flugrobotersystemen
- Arbeitssicherheit und ausfallsichere Flugsteuerungstechnik